こんにちは、インフォマティクスの空間情報クラブ編集部です。
本記事では、道路周辺施設の管理や路面性状調査、安全点検をはじめ、道路維持管理業務に活用できるMMS(モービルマッピングシステム)による計測と活用例についてご紹介します。
目次
MMS(モービルマッピングシステム)とは
MMS(Mobile Mapping System:モービルマッピングシステム)とは、各種計測機器を車両に搭載し、道路を走行しながらレーザースキャンする車載型移動計測システムのことをいいます。
道路や道路周辺の広範囲において色の付いた点群を取得し、すばやく正確に計測できるため、特に社会インフラ分野の業務への活用が期待されています。
国土交通省では道路管理の効率化を図るため、平成30年度よりMMSによる三次元点群データの収集・活用に取り組んできましたが、令和4年8月22日より、それらのデータ提供を開始することを発表しました。報道発表資料はこちら
機器構成
MMSに搭載される機器の例をご紹介します。
MoMos(モモス)
岡山理科大学 島田様が研究・開発された「MoMos」は以下のような機器から成ります。
- GNSSアンテナ
- 上面/下面レーザースキャナ
- IMU(慣性計測装置)
- オドメータ(走行距離計)
- 前方用/路面用カメラ

Glove(グローブ)
インフォマティクスが提供している「Glove」の機器構成は以下のとおりです。
- LiDAR装置:点群データを取得するためのセンサー装置
- 4Kパノラマカメラ:360°全方位画像を撮影するためのカメラ
- GNSS受信機+IMU:GPS等で位置情報を取得する高精度GNSS受信機と車両の姿勢情報を取得する装置
- 車載PC:取得したデータを処理するPC
- 外付けSSD:外部接続で使用するデータ記憶装置
- 車載用治具:取り付け治具


MMSでのデータ処理
MoMos
MoMosでのデータ処理の流れは以下のとおりです。

車両搭載のレーザースキャナで計測して得られる座標は相対座標だけなので、相対座標と絶対座標、姿勢情報を統合し、計測点の絶対座標を求めます。その後、カメラで撮影した画像情報を加えて、色付き点群を大量に生成していきます。
以下はMoMoSで取得した色付き点群の例です。膨大な数の点によりシーンが構成されています。

MoMosで取得した色付き点群データの例
Glove
Gloveでのデータ取得から計測までのプロセスは以下のようになります。
- 機器一式※1 を車両に設置します。
- 1を用いてデータを取得します。取得したデータはドラック&ドロップでビューワに取り込めます。
- ソフトウェア※2 で計測します。ビューワに取り込んだデータをもとに、距離・高さを計測できます。
※1 詳細は前述「機器構成」の項をご参照ください。
※2 ソフトウェアはインフォマティクスの空間情報処理技術を使って開発した製品です。

電柱高さ計測

電柱・電線の離隔計測

建築限界の重ね合わせ
Gloveで取得した点群データの例
点群の課題
MMSはスピーディかつ正確に大量の点群データを取得できるメリットがありますが、以下のような課題もあります。(現在の点群技術では、以下の課題は解決されています。 2023/12/26追記)
- シーンとして見た場合、リアリティに乏しい
- 向こう側が透けて見えるなど、遮蔽の概念がない
- 点群は雲のような状態なので、シーンを切っても断面が得られない
実際の道路関連業務では道路の断面図を最終成果物として納品するため、点群から3Dモデルへの作成ニーズが非常に高いわけです。
したがって点群から3Dモデルを作成する場合、プロセスのどこかで点群データを面に変換する作業が必要になります。
従来の変換処理
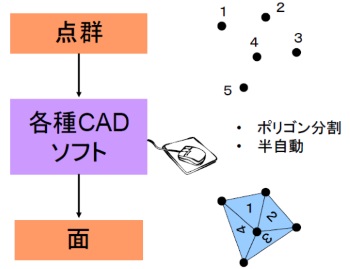 従来は以下の流れで変換作業を行っていました。
従来は以下の流れで変換作業を行っていました。
- 点群の必要な部分だけを切り出す
- その部分データを各種のCADソフトを使ってポリゴン分割(半自動処理)する
- 3次元の面データを作成する
しかし、MMSで取得した点群は数千万~億という膨大な数になるため、その中から必要な部分だけを切り出すには大変な手間を要します。
また、雲のような点群に対してどのように面を張ったらよいのかという問題もあります。
このように、MMSで計測したデータから欲しい場所の面データを即座に生成することができないため、せっかく取得した点群データも従来の方法では活用が進まないという課題がありました。
MoMoSの概要
MoMoSは、上述のような経緯を受け「好きな場所に面を張ってすぐに見たい」というニーズに応えるために開発されたソフトウェアです。
2009年8月に開発に着手したのち、特許出願、登録を経て製品化に至りました。
特長
高速に面を張れる
レーザースキャン、点群データはレーザスキャン単位で塊となっていますので、まずその単位ごとに整理する処理を行います。
次に、レーザースキャン単位に整理された点群データを高速に検索可能な状態で保持して管理します。
最後に、そのデータを取り出して分割し、面を張っていきます。この部分の作業を膨大な回数繰り返していきます。
面を張るまでの処理プロセス
- 点群データをレーザースキャン単位に整理
- 高速に検索可能な状態で管理
- 2本のスキャンを取り出して分割し、面を生成

MoMoSでは、3番目の工程にあたる局所処理の繰り返しにより全体を描いていくため、全体のデータ量に左右されにくいという特長があります。
左下は従来の点表示のシーン、右下は面を張ったシーンです。右下の画像では、手前と奥行きが表現されており、また、向こうが透けて見えるという問題も解消されています。
左右いずれの画像も元データは同一ですが、面を張っただけで奥行きのあるリアルなシーンが得られます。

好きな場所をすぐに見れる
面を張ったあとで好きな場所をすぐに見たいというニーズもあります。
MMSは走りながら走行軌跡のデータを残していきます。走行軌跡は粗い折れ線ですが、時刻と空間座標が含まれているので、時刻と空間をうまく結びつけるヒントになります。
レーザースキャンで得た点群は、走行軌跡の周りに沿うようにデータが存在しています。
したがってこのデータの一部分をCGとして画面に描く場合、視野部分だけを描けばよいのですが、データ抽出自体が大変なのでここにジレンマが生じます。
そこで先ほどの走行軌跡を使って、走行軌跡が視野に入る部分(t1)、出る部分(t2)、また入る部分(t3)、また出る部分(t4)を調べていくと、その場所に対する時刻がわかります。
データは時刻順に並んでいるので、単純に時刻データのCGを描くようにすれば、必要なデータだけをスピーディに抽出できます。

主な機能
MoMoSの各種機能をご紹介します。
点群を高速に面表示できる
シーンに面を張るとリアルに見えてきます。
そもそもCGでは、あえて元の色を使う必要はなく、例えば下図のように擬似的にシェーディングすると最初は見えていなかった凹凸が見えてきます。

断面が出せる
例えば、トンネルに対して面を張れれば、面を張った筒状態のものをバサッと切ってみます。
すると、その切った断面にはきれいな切れ目の線データが見られます。下図では2つの線が重なっています。
1つは、トンネルの中に入ってレーザが断面を測るという従来の測量方法によるデータです(青線)。
もう1つはMoMoSの出力で、MMSでトンネル内を走行して集めたデータを持ち帰り、デスクトップで重ねて張った断面です(赤線)。
トンネル測量では、従来の方法だと通行止めをする場合が多いのですが、MoMoSを使った方法では以下のようなメリットがあります。
- 通行止めをせず、従来と遜色ない精度のデータを得られる
- それをデスクトップで可視化できる
- どの部分でもいくらでも断面データを得られる

断面形状をDXF形式に出力できる
下図は実際の断面形状の取得例です。黄色い線が断面形状で、この部分をDXF形式などの外部ファイルに書き出し、CADソフトに取り込んで使うことができます。

視距を自動判定できる
視距を自動判定できるのもMoMoSの特長の1つです。
視距とは、道路上1.2mの高さから走行車線前方の高さ10cmの物体の頂点を見通せる距離のことをいいます。
道路構造令上、設計速度に対する視距は決まっており、例えば設計速度40km/hを60km/hに変更したいことがよくあります。
このような場合、従来なら道路図面上で視距が満たされるかどうかを逐一測り直します。
しかし何十kmとなると人手では実質不可能なので、これを自動化して欲しいという要望に応え、MoMoSに視距の自動判定機能を搭載しました。

下図は視距の自動判定中の図ですが、視距の指標が車の前方をずっと逃げていきます。
道路のカーブがきついとこの指標が隠れて見えなくなり、見えなくなると下の判定結果に赤い帯が表示される仕組みになっています。
この判定結果はCSV出力できるので、一回MMSで走れば視距が満たされていない部分(道路改修を必要とする部分)が判るわけです。

補修必要箇所の情報を集約して表示できる
視距だけでなく「わだち掘れ」や縦断凹凸などの補修必要箇所も、MoMoSを使えば一度に情報を集約して表示できるため大変効率的です。

道路台帳平面図の新旧を比較できる
これは、MoMoSの中核的な部分を取り出して作成した別ソフト(MoMoSファミリー)の機能です。
データを平行投影して地図のような画像を作る機能です。
点のままでも作成できますが、上下のあたりの密度が低くなったり隙間ができたりするため、面を張ったほうがきれいな図ができます。
この機能を使えば、こういった図を簡単に作成できるので、古い道路台帳平面図と比較し、更新状況を確認できます。

GISと連携できる
GISと連携できるため、MoMoSで詳細な場所を表示することができます。例えば、任意の箇所の座標値や寸法計測、横断図を出力できます。
以下はSISをベースに構築されたGISの画面です。これにMMSで走行した軌跡を重ね合わせてみます。
赤い軌跡の部分に含まれているさまざまな情報をMoMoS側で調べ、気になった画面部分でストップして断面を切り、DXF形式で書き出してCADソフトで詳細にソートするという作業フローが可能になります。
まさに鳥の目からアリの目まで、自由自在な視点で情報を眺めることができます。

今後の展開
今後の展開として以下を予定しています。
- GISとの連携をますます強化していきたい
- Webブラウザから指定のURLにアクセスするだけでMoMoSが使えるように、クラウド対応にしたい
- 各種のMMSが出てきているので、さまざまなレーザーに対応できるようにしたい
MoMoSの開発を通じて産学の橋渡しを行い、3D計測や点群データの活用促進をご支援できればと思っています。
インフォマティクスからのお知らせ
インフラ設備点検支援システム
インフォマティクスでは、LiDAR・360°パノラマカメラ・GIS(地理情報システム)を組み合わせ、インフラ設備の点検・維持管理を支援するシステム「Glove」(グローブ)を提供しています。
また、広域大容量3D点群データをWeb上で簡単スピーディに公開・共有・管理できる「3D-Bucket」(スリーディー・バケット)も提供。「容量の大きい点群データを共有できない」「端末ごとにソフトウェアの導入が必要」といった課題を解決します。
資料請求もしていただけますので、お気軽にお問い合わせください。
インフォマティクスでは「LiDAR×360°画像×地図情報」を活用した設備点検向けソリューションをご紹介するウェビナーを開催しました。
ウェビナーのアーカイブ動画をご覧になりたい方は、以下よりお申し込みください。
【記事について】
本コラム記事は、空間情報シンポジウム2015大阪会場に登壇された島田英之様のご講演「MMS による道路の3Dモデル構築とその応用」の内容および関連資料をもとに、ご本人の承諾を得てインフォマティクスが編集したものです。
執筆者ご紹介 島田英之(しまだひでゆき)様
岡山理科大学 工学部情報工学科 教授
(略歴)
1966年香川県生まれ。1994年岡山理科大学工学研究科博士課程修了。岡山理科大学助手、講師、准教授を経て、現在、同大学工学部情報工学科 教授
<参考>国土交通省ウェブサイト